|
|
| |
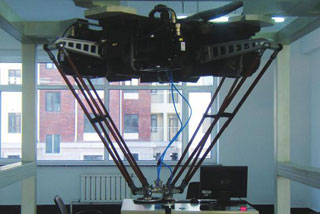
| 并联高速拾取机器人 |
 |
|
|
并联高速拾取机器人是用于工业、医药、食品行业中执行物品搬运、装箱等任务的工业机器人。并联高速拾取机器人控制系统集机械、电子、信息、智能控制、计算机建模等先进技术于一体,实现了对目标物品的视觉定位、抓取、搬运、旋转、摆放等操作,可对自动化流水生产线中无序或任意摆放的物品进行抓取和分拣。
|
|
| 功能与指标 |
» 摄像头对目标物体进行视觉识别与精准定位
» 运动控制定位精度小于0.1mm
» 拾取最高速度120 件/min
» 可视化监控界面
|
| 系统组成 |
» 机械机构由4 支主动臂,8 支从动臂以及1 个移动平台组成
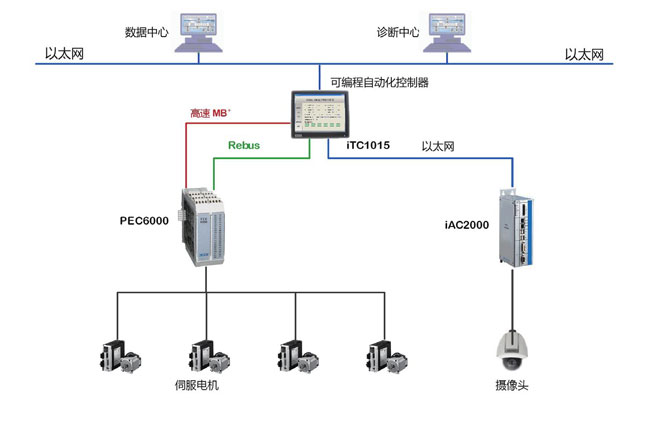
» 控制系统由PAC 控制器iTC1012、视频处理器iAC2000、高速I/O 扩展模块PEC6000、摄像头以及伺服控制器组成
» 视频处理器iAC2000 连接摄像头,对目标物体的位置和位姿进行视觉识别与定位
» 利用PLC_Config 编程软件开发的机器人控制程序,实现了多轴高速同步、搬运轨迹抖动抑制、高精度定位等功能
» 同时利用DView 监控管理开发软件编写的操作界面,可以直观的展示出轨迹示教、参数设定和三维仿真的画面
|
| 应用效果 |
» 实现了用户需求,完全替代原生产线上的进口机器人
» 降低用户并联机器人的采购成本,提高了流水生产线中的拾取和分拣效率
» 达到国内工业机器人的尖端水平,为医药、食品等行业提供了先进的自动化流水装配线
|
|
| |
|
|